Vote on a VR headset for PS:1 and sending delegates to NOMCON
Update: both votes passed. We’ve got two votes scheduled for tomorrow, May 1. You can still vote by proxy
Update: both votes passed. We’ve got two votes scheduled for tomorrow, May 1. You can still vote by proxy

PS1 member Jonathan Howlette recently completed a project in which he experimented with Shou Sugi Ban (Japanese wood charring) to create
PS1 is looking for a new host for the CNC area. Becoming an area host is a great way
We included a poll in the last newsletter to determine which photo sharing sites are most popular among PS1
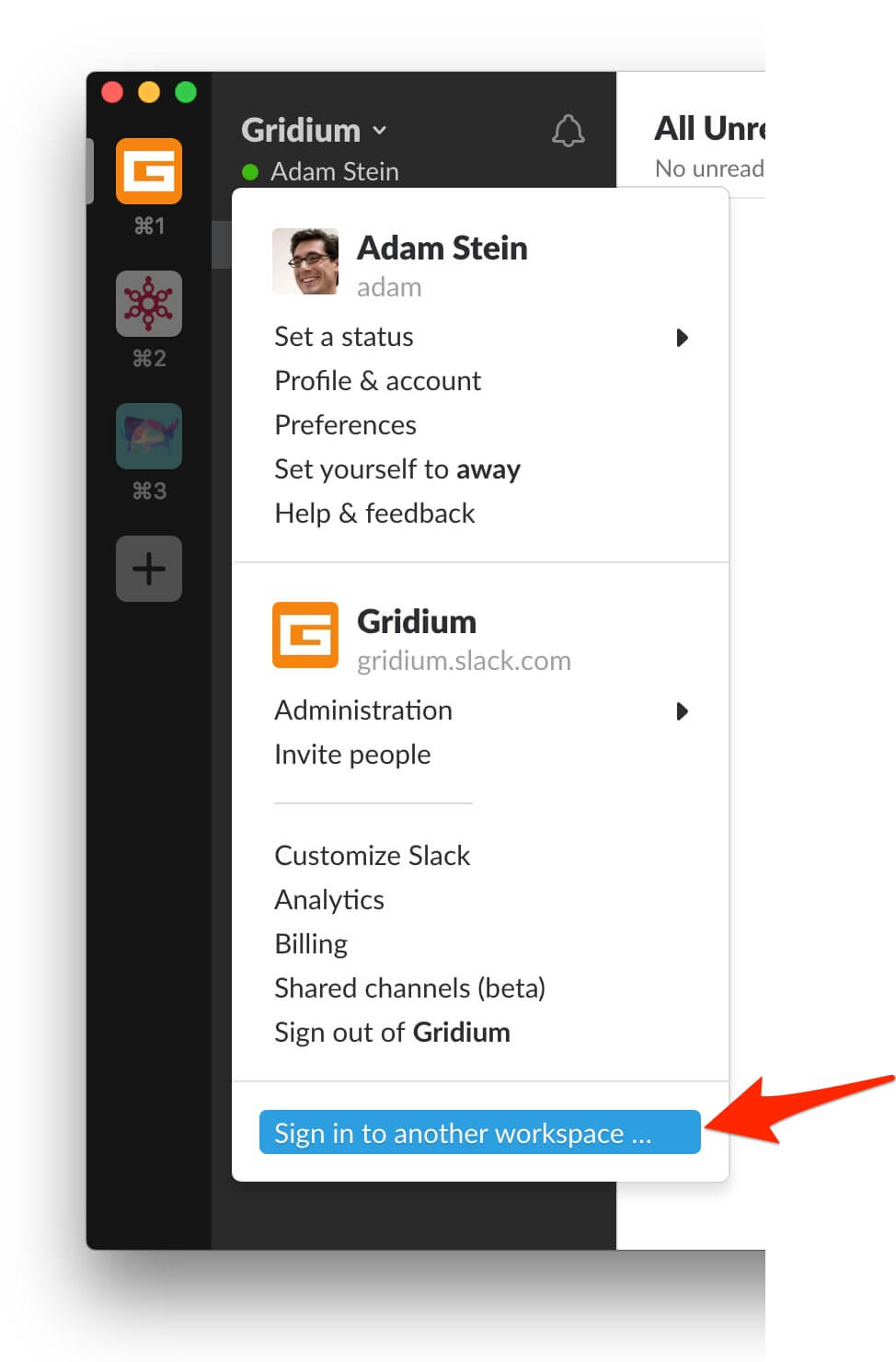
PS1 has had a Slack workspace for a while, and if you’re a member, you should have by now
Owl Lumber is beloved for its selection of hardwood. If you’ve never been to one of their three stores,
As part of a series of efforts to improve communications both within PS:1 and with the wider community, we
When PS:One expanded in 2017, we negotiated a five-year lease with an option to renew for another five years.

Have you heard about the Power Racing Series? It began in 2009, right here at PS1! This year, I